Demonstrations |
|
|---|---|
FASTS |
|
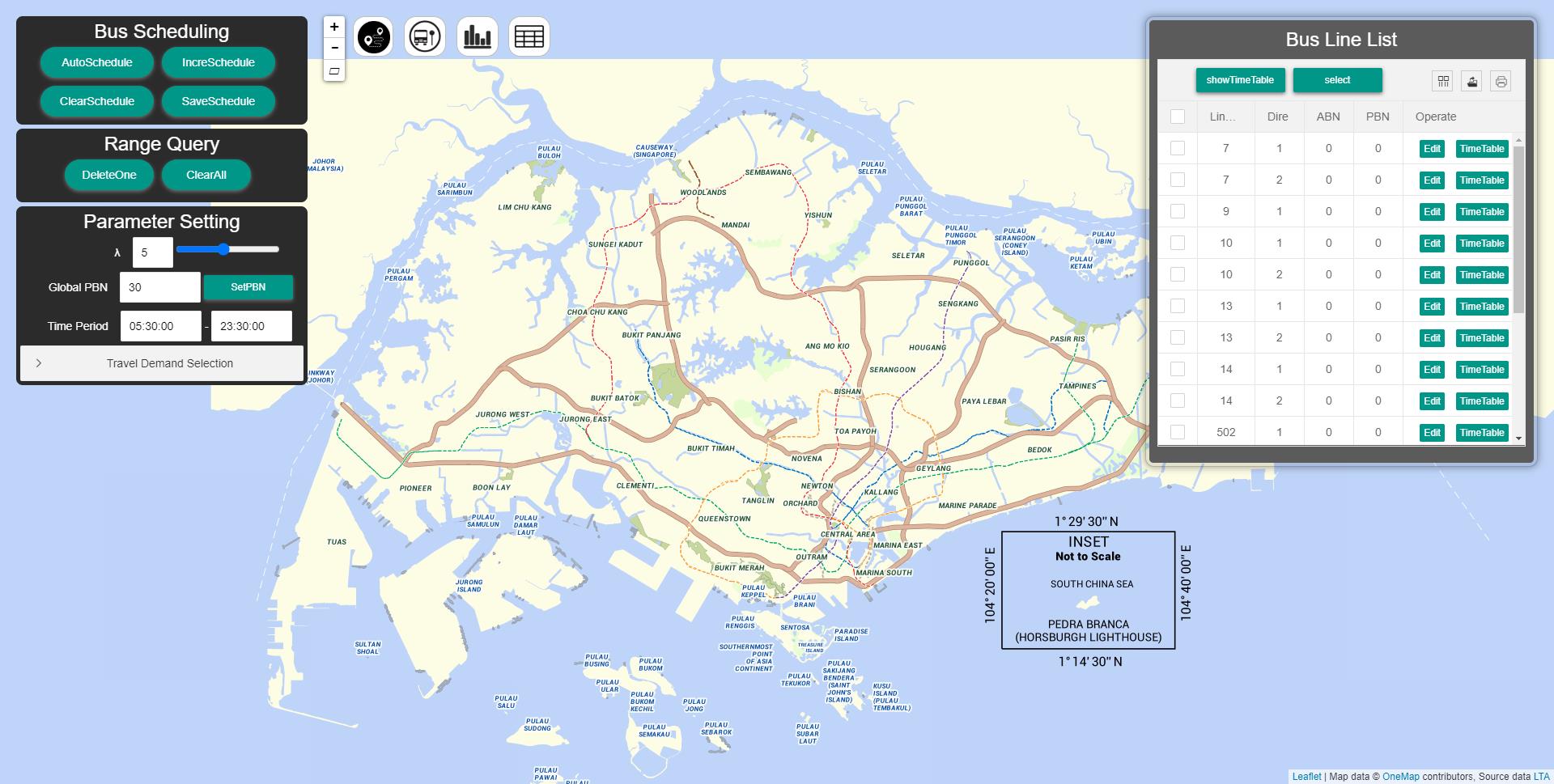
| FASTS is a satisfaction-boosting bus scheduling assistant framework, which assists users to find an optimal bus schedule. FASTS performs bus scheduling based on the constraints specified by the user in either a coarse-grained or a fine-grained manner, supports different explorations with a varying number of constraints, and provides analysis to quantify the performance of bus schedules and presents the results in a visually pleasing way. We demonstrate FASTS using real-world bus routes and bus touch-on/touch-off records in Singapore. | |
|
|
Trip Planning |
|
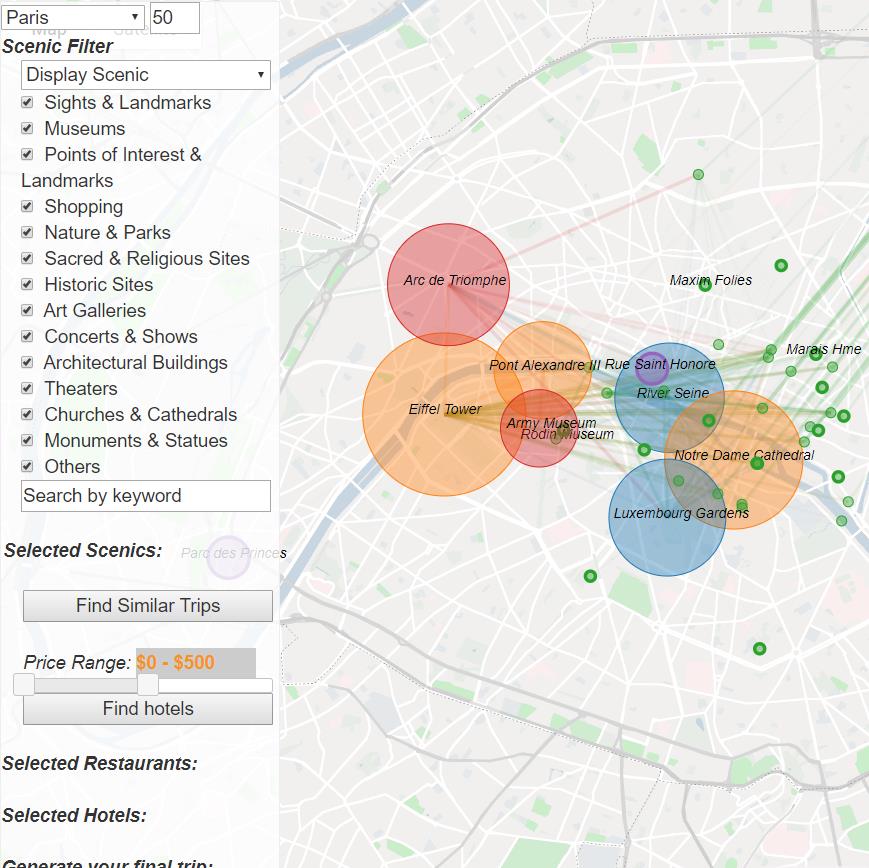
| TISP is a Trip planning system by an Integrated Search Paradigm. TISP helps users (even those without any prior knowledge of the target city) interactively discover a city and incrementally plan a unique trip. Planning a trip usually involves a series of search processes, where users may issue several queries of the same type (with different settings), or even different types of queries, until the desired points of interest (POIs) and trajectories are found. In particular, for POI search, it involves the keyword query, k-Nearest Neighbor (kNN) query, Top-k Spatial Keyword (TkSK) query, Aggregate Nearest Neighbour (ANN) query, and Aggregate Textual Nearest Neighbour (ATNN) query. For trajectory search, it involves the k-Best-Connected-Trajectory (kBCT) query and Top-k Spatial-Textual Trajectory (TkSTT) query. | |
|
|
TTorch |
|
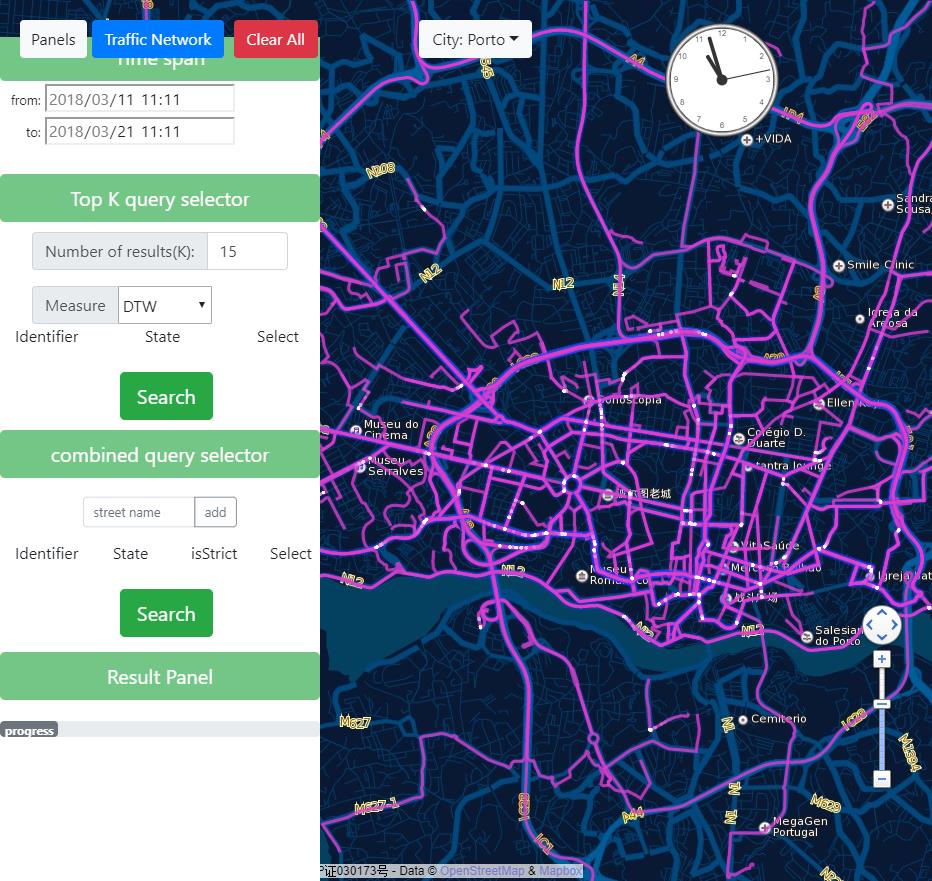
| We design a search engine, Torch, for trajectory data and serve almost all metric and non-metric trajectory similarity computations. In particular, we first map the trajectories into the road network, then a trajectory can be represented by a set of road segment ids. Moreover, a road segment is also crossed by many trajectories. Hence, we can use the inverted index to organize all the trajectories crossing a same road. Compression techniques over trajectories and inverted lists will further reduce the space of dataset and index. | |
|
|